Portfolio
Web Design
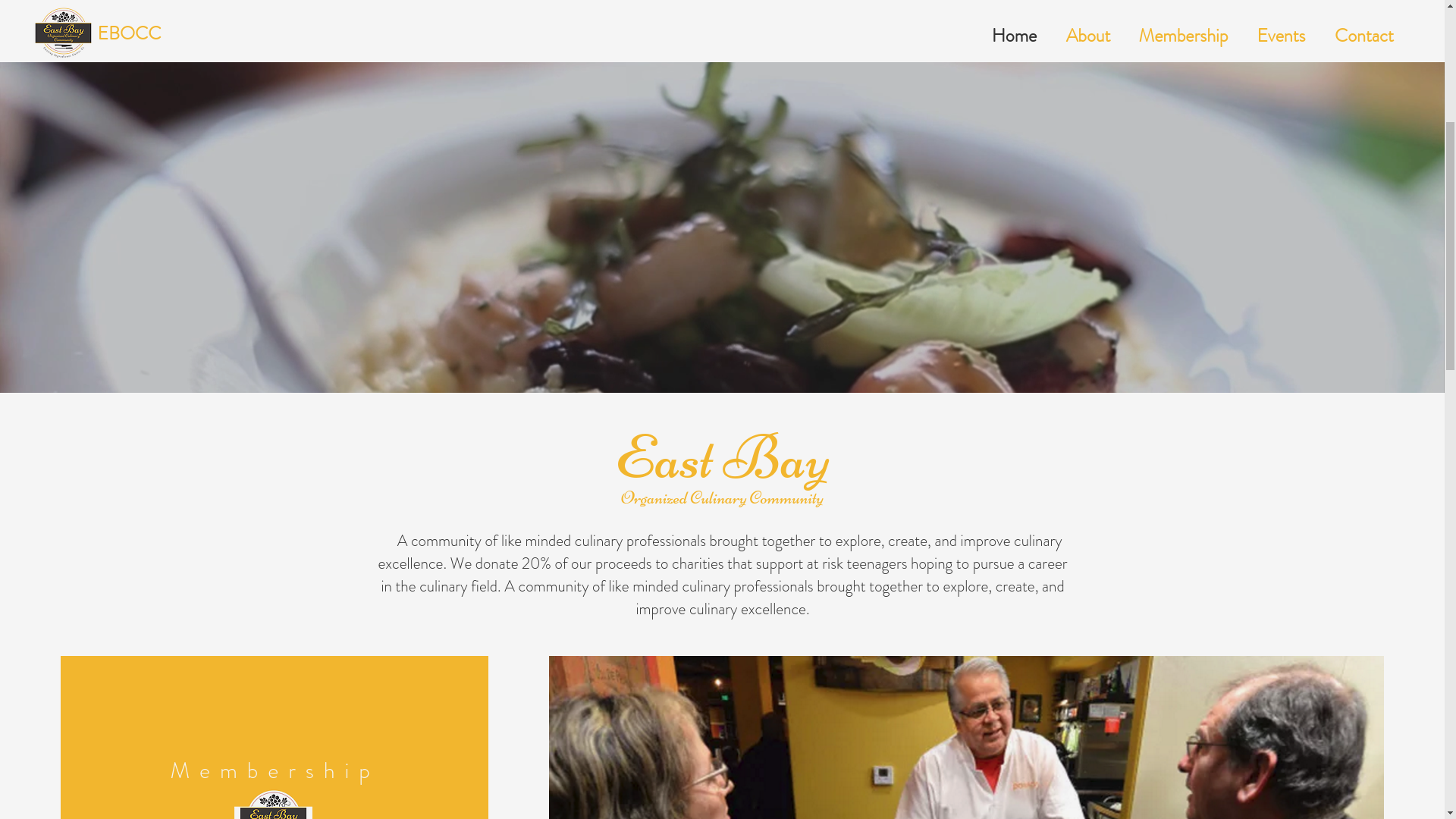
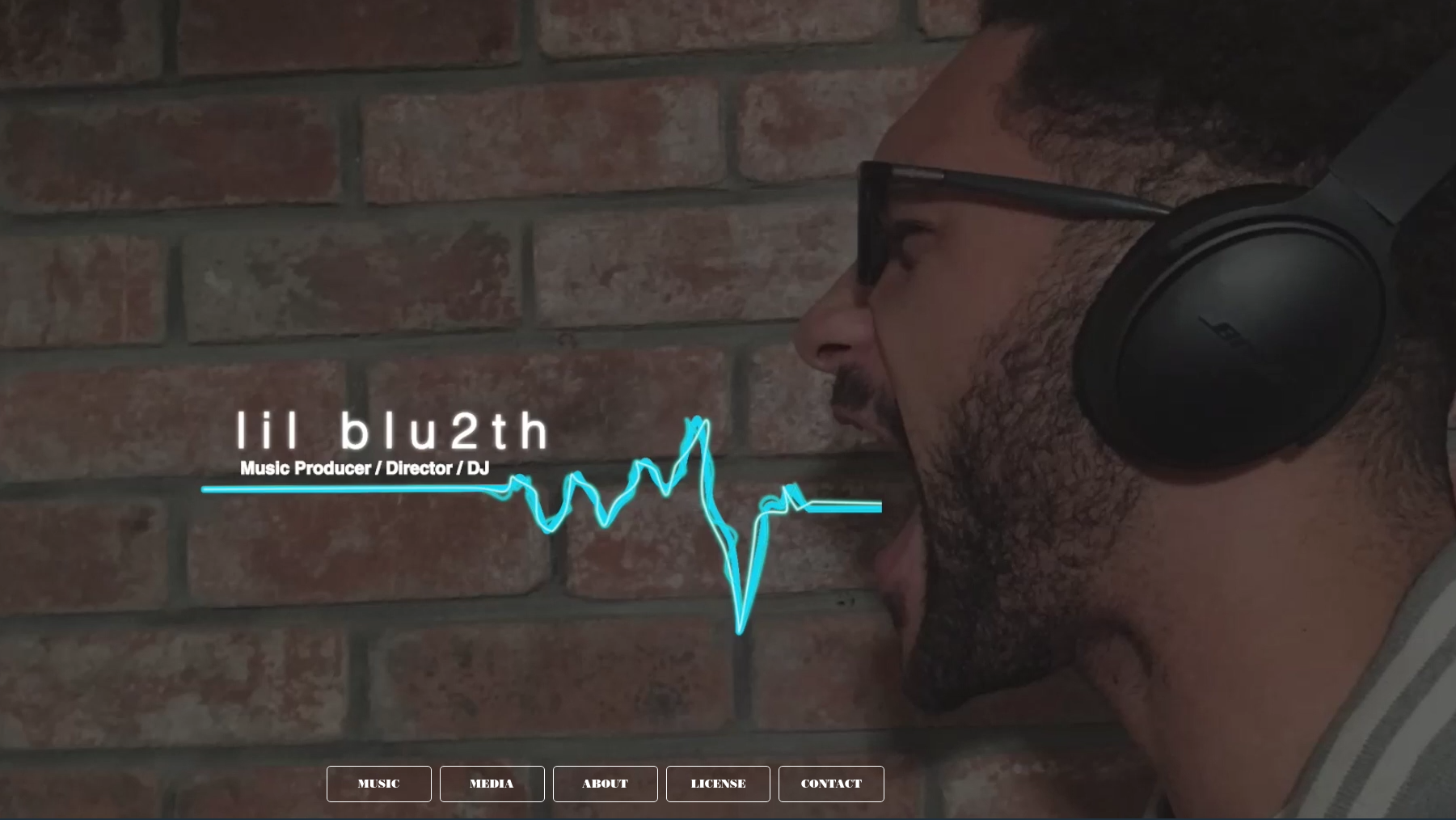
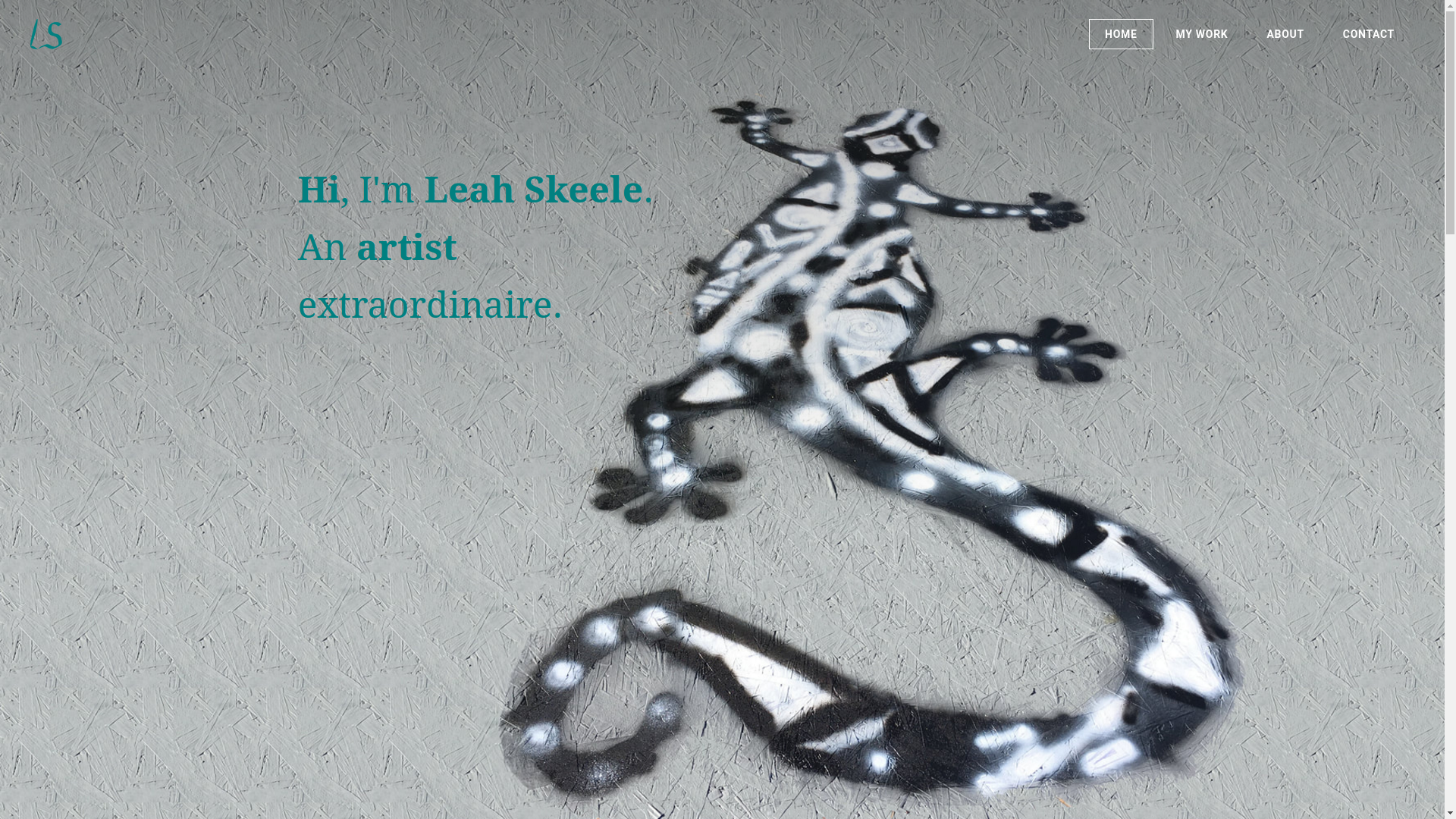
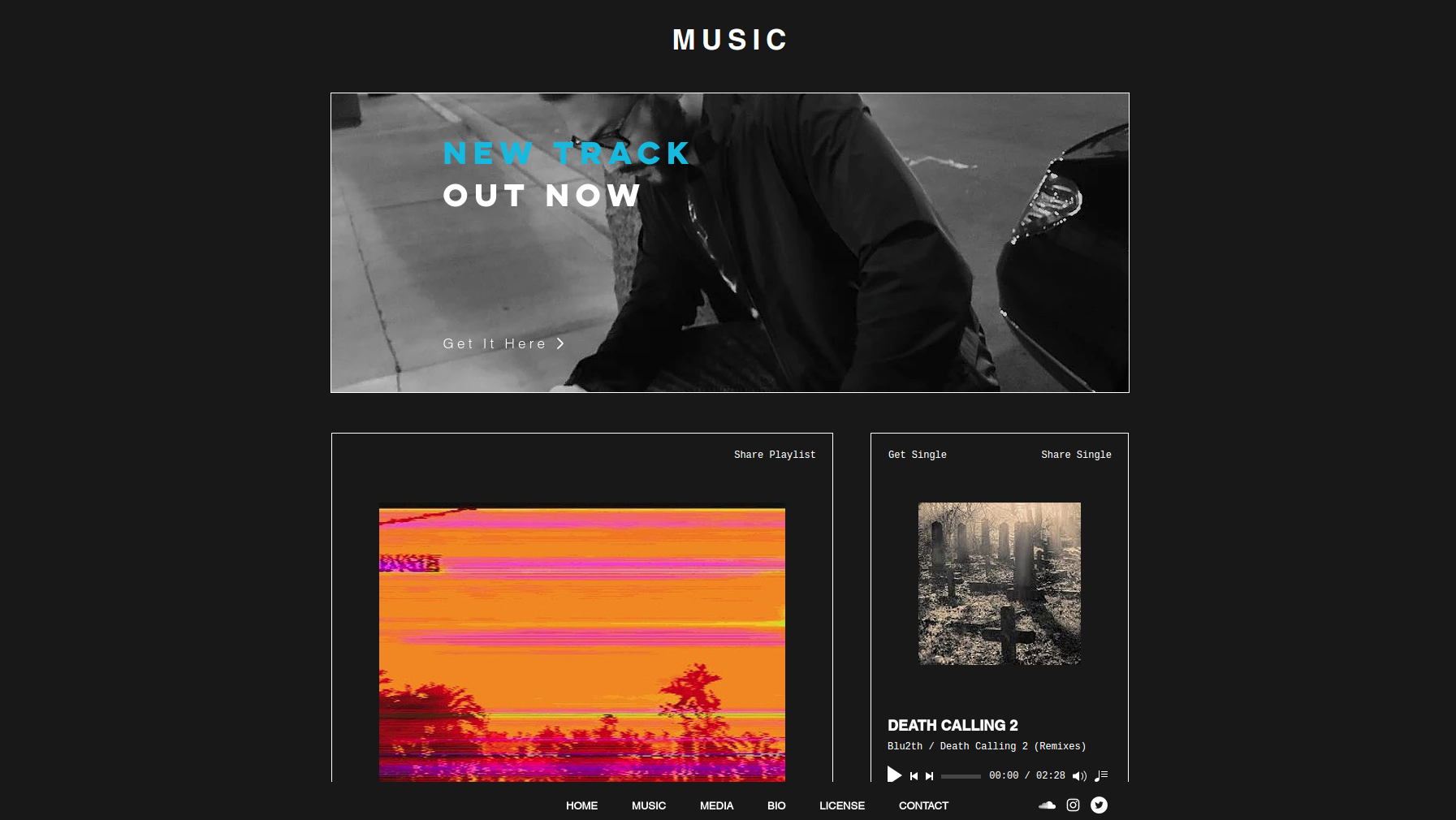
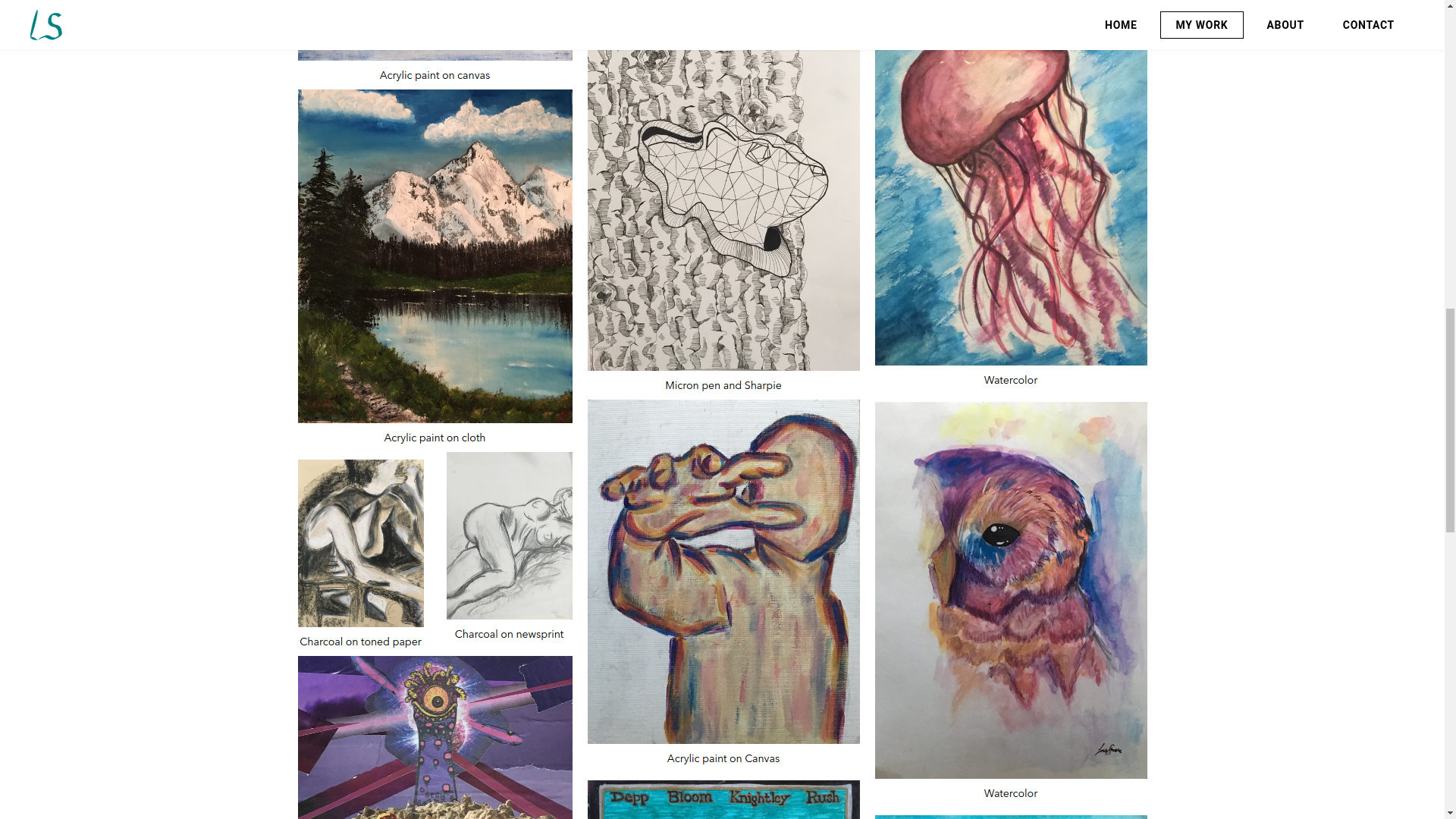
East Bay Organized Culinary Community is a professional community of artisans, I designed the website and created workflow for member management. I additionally did website designs for music producer and artist portfolios. Music producer lilblu2th, sells music tracks of his custom beats to an online audience. The website includes a music manager and store linked to his account for immediate purchases. Leah is a talented artist and needed an online portfolio to not only document her projects but also consolidate a portfolio for business ventures. Check out their work below.
EBOCC lilblu2th Leah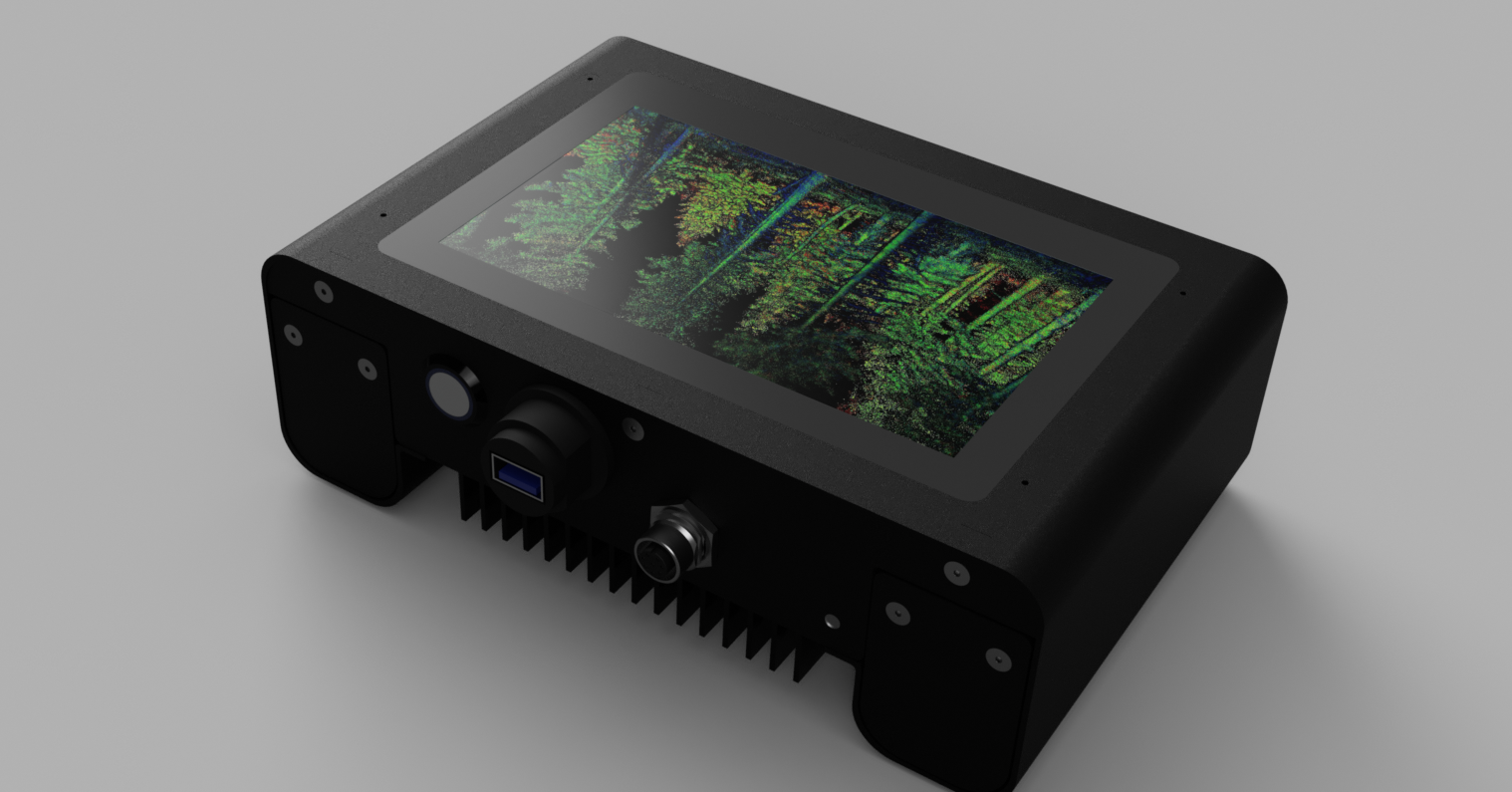


Spectrum Geomatix
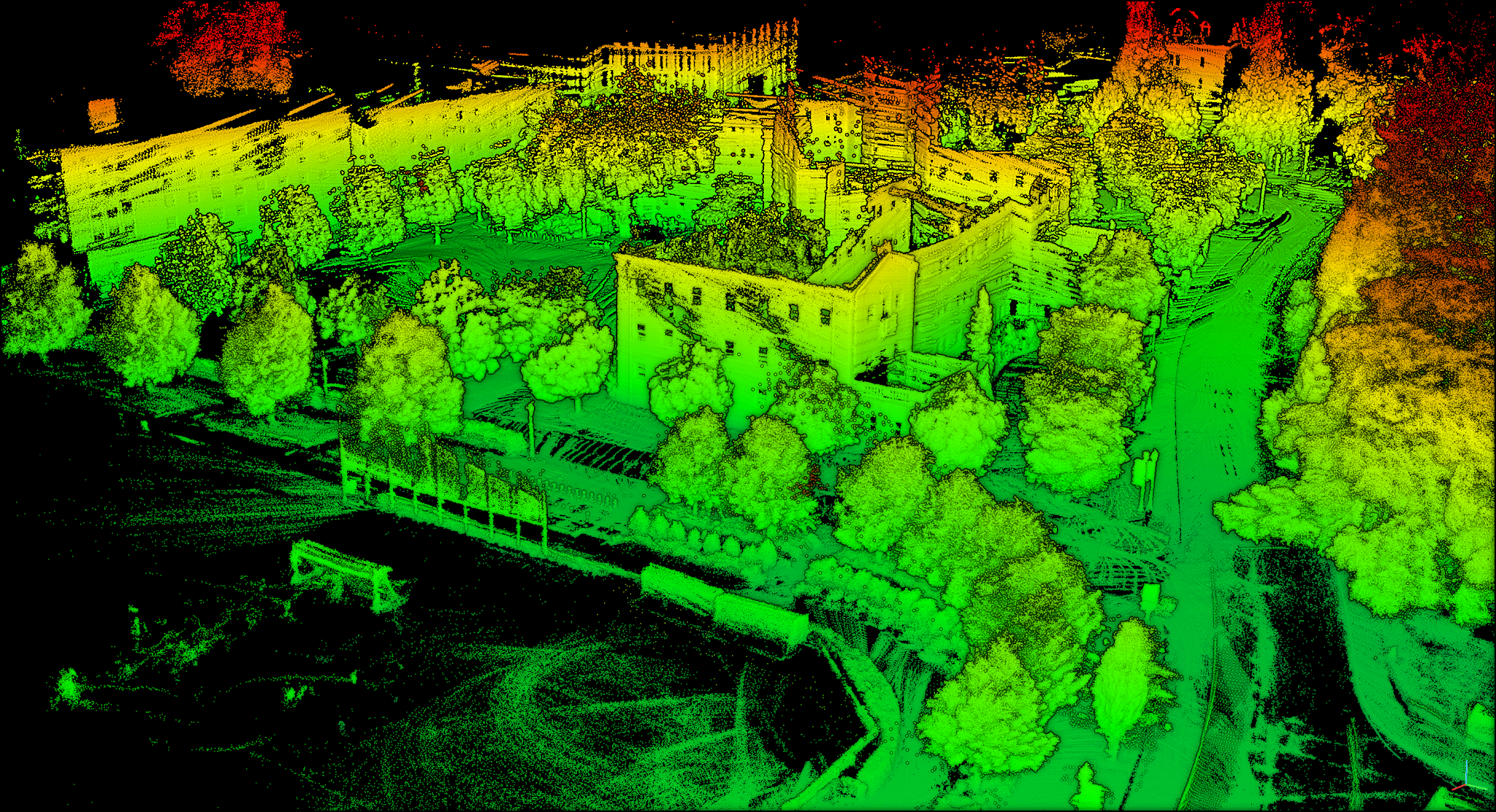
My work at Spectrum Geomatix has mostly involved producing a mobile laser scanner, which creates 3d point clouds, specifically for the forestry industry. This work included all aspects of product development, from initial sketches, to production. Beyond product development I've been working on automating some of the point cloud analysis we do for clients. This includes writing C++ code for identifying trees and extracting metrics using PCL.
More Information
UAV Tunnel Mapping
While working for Near Earth Autonomy I built autonomous drones for mapping indoor tunnels; I worked on designing the electrical harness, the sensor integration, and the software stack including the planning methods and simulation software for testing (ROS, Gazebo). I also performed the live flight tests and debugged any issues.
More Information
Coordinated Multi-UAV Exploration
My research in the Robotic Decision Making Laboratory on indoor exploration of multiple UAVs led to the development of a research platform capable of indoor autonomy for under $1500. Each quadcopter has a i7 computer with 16gb of RAM running Ubuntu with ROS for easy development of research. The research focused on maximizing the map returned to the starting location using a state machine to collaboratively explore and relay information back. The research was published in ICRA 2015.
More Information
UAV Firefighting Simulation
This research explored the most efficient way to monitor a realistic fire by incorporating data from the standard in wildfire simulation, FARSITE. I developed a simulation that parsed the FARSITE data and clustered dynamic regions into hotspots that could be monitored over time. Greedily pursuing these hotspots showed significant improvement over the current practice of circling the fire. It posed a challenging problem because the hotspots moved over time along the fire frontier, making it a time varying traveling salesman problem.
More Information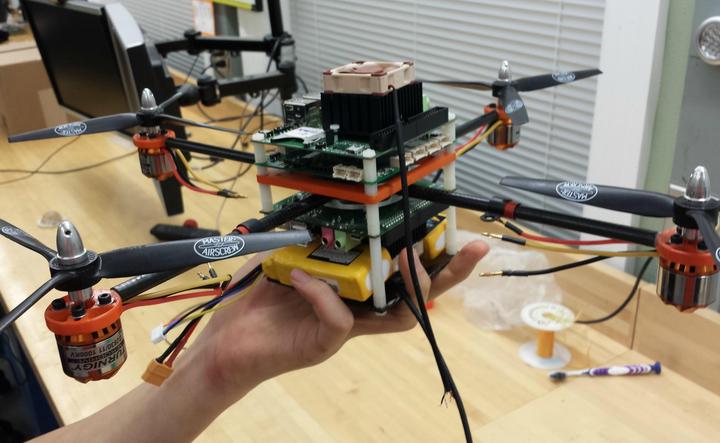
Autonomous Aerial Vehicle Team
As the mechanical team lead in 2012-2013 school, I was responsible for overseeing the development of the hardware for a vehicle capable of autonomous flight. Some challenges include incorporating two Odroid X2 for onboard processing, and an Xtion for 3d mapping. The heavy payload required a lightweight chassis design to keep the build size small and the motors operating at their optimal rpm.
More Information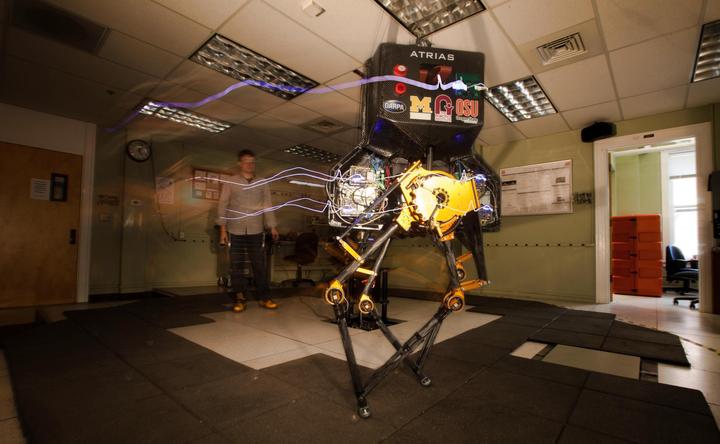
Dynamic Robotics Lab- ATRIAS
I was hired my junior year as an undergraduate research assistant to assist with research in the Dynamic Robotics Lab. I continued to work with them until my graduation. During that time I built and maintained three full size bipedal robots for research labs at Oregon State, University of Michigan, and Carnegie Mellon. For my senior project we designed passive feet for measuring reaction forces through the walking gait. I also helped perform walking gait tests over obstacles at the Royal Veterinary College in London.
More Information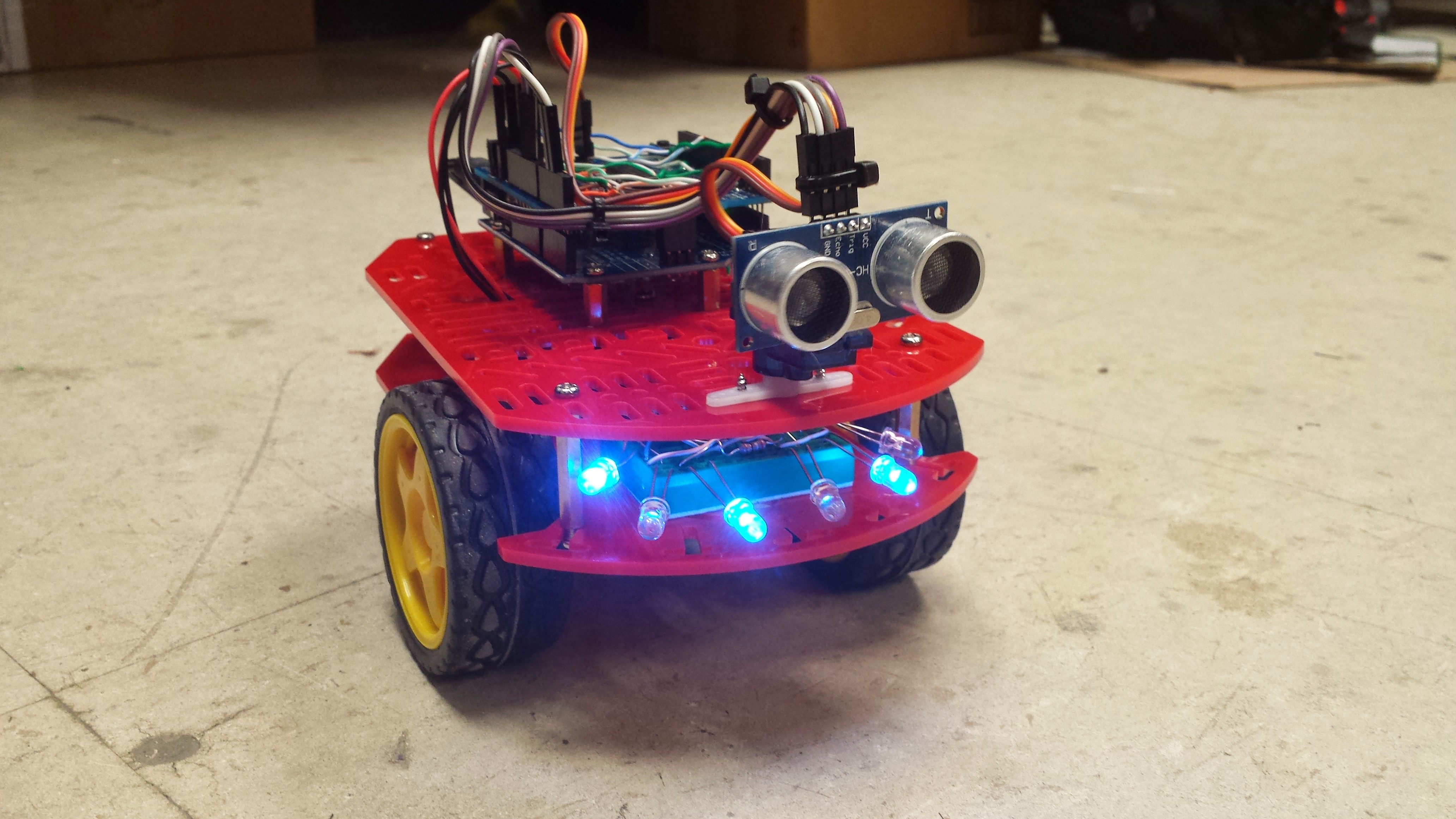
Oregon Robotics Kit
I organized classes, workshops, and competitions for robotics club members learning basic robotic skills with the Oregon Robotics Kit (ORK). This included designing and maintaining the kit as an educational tool for getting members more involved and transition into competition teams. The kit walked students through simple mechanical design/assembly, reading electrical schematics and soldering, as well as writing code in arduino (C) for basic functionality. Over 50 kits where sold with class sizes up to 30 students.
More Information
'Hardware Weekend' Competitions
The Oregon State Electrical Engineering department hosts Hardware Weekend which is a 30 hour ‘hackathon’ to build the coolest thing possible in that time. I’ve participated in three and built an exoskeleton arm (competition winner), a volumetric display, and a very fast RC car. For the exoskeleton I designed a 3d printed cycloidal gear to utilize a high rpm dc brushless motor and increase the torque. The volumetric persistence of vision project was CAD modeled for weight balancing and mounts six microcontrollers with 64 LEDs each spun by a DC brushless motor. The RC uses four brushless motors, each mounted on a servo for full control. The car uses the custom flight controller software developed by the OSU Robotics Club Aerial Team on a STM32F3 development board.
More Information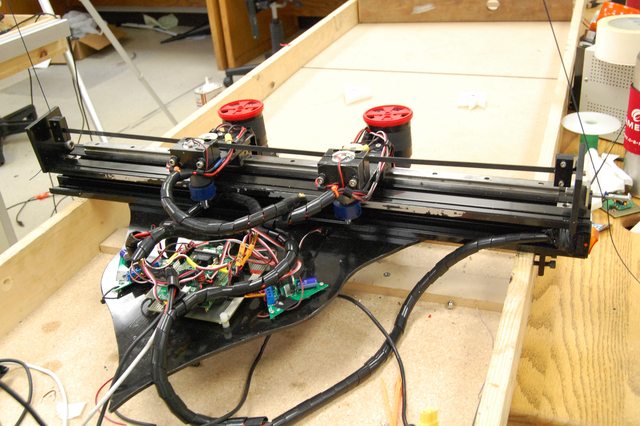
Applied Robotics
With a team of two other undergraduate engineers we built a robot to compete in Oregon State’s applied robotics class. The competition was a robotic version of crossfire, a dynamic two person game from the 80’s. I designed and built the mechanical system which included two shooters, force fed hoppers, and a belt driven linear rail system. The shooters where 3d printed and use low-profile motors to accelerate steel bb’s along a track to shoot at the game pucks.
More Information
ASME Student Design Competition
The American Society of Mechanical Engineers hosts a student design competition every year. My design class uses the competition as the term project. For the class I made a miniaturized mars rover to read a gauge, press a button, and pick up and drop off a sensor. For this I coded in C and used Xbees to communicate over serial from my computer to an Atmega microcontroller. After the class a fellow student and I collaborated for the regional competition and came in 3rd place. I designed and built the Carbon-Fiber/Kevlar cover and a four-bar link that allows the camera to follow the underactuated gripper.
More Information